一站式SMT组装&DIP插件组装工厂,寻求定制解决方案的原始设备制造商(OEM)的绝对选择!
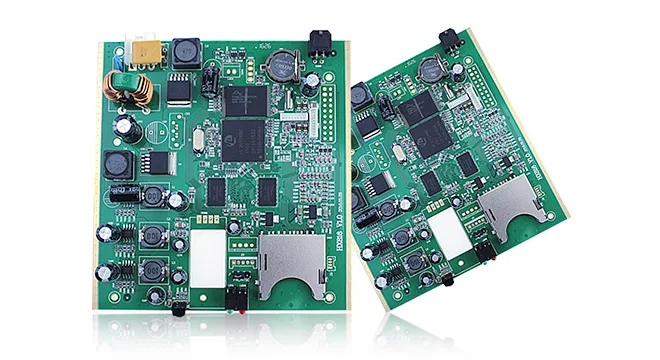
机器人主控制系统的PCBA需要能够承受震动、冲击和温度变化,因此设计时需考虑到环境因素。
在整个组装过程中,采取适当的防静电措施,如使用防静电手环、防静电垫和防静电包装。
使用精确的焊接技术,如选择性焊接、波峰焊接或手工焊接,确保焊接点的质量和一致性。组装后进行视觉检查和X射线检测,确保焊接点无缺陷,元件无错位,确保PCBA设计和制造过程符合国际安全标准和法规要求
运动控制:根据预定的运动轨迹和速度要求,控制机器人的各个关节和执行机构的运动。这包括位置控制、速度控制和加速度控制等。
传感器数据处理:接收来自各种传感器的信息,如位置传感器、力传感器、视觉传感器等,并对这些数据进行处理和分析。这有助于机器人感知周围环境,做出相应的决策。
任务规划:根据给定的任务目标,制定机器人的行动策略和路径规划。这包括确定机器人的运动顺序、选择合适的工具和操作方式等。
通信管理:与外部设备进行通信,如上位机、其他机器人或传感器网络。这可以实现远程监控、数据传输和协作操作等功能。
安全保护:监测机器人的运行状态,确保其在安全范围内运行。当出现异常情况时,及时采取措施,如停止运动、报警等,以保护人员和设备的安全。
控制器:通常是一台高性能的微处理器或微控制器,负责执行控制算法和处理各种输入输出信号。
存储器:用于存储控制程序、参数和数据。这可以包括随机存取存储器(RAM)、只读存储器(ROM)和闪存等。
输入输出接口:连接各种传感器、执行机构和外部设备。这可以包括数字输入输出接口、模拟输入输出接口、通信接口等。
电源管理:为机器人主控制系统提供稳定的电源供应。这包括电源转换、电池管理和电源保护等功能。
实时性:机器人主控制系统需要具备较高的实时性,能够及时响应各种输入信号和执行控制命令。这对于保证机器人的运动精度和安全性至关重要。
可靠性:由于机器人通常在复杂的环境中运行,主控制系统需要具备较高的可靠性,能够抵抗各种干扰和故障。这可以通过采用冗余设计、故障检测和恢复机制等方式来实现。
可扩展性:随着机器人技术的不断发展,主控制系统需要具备良好的可扩展性,能够方便地添加新的功能和模块。这可以通过采用模块化设计、开放的接口和软件架构等方式来实现。
智能化:现代机器人主控制系统越来越智能化,能够自主学习和适应不同的任务和环境。这可以通过采用人工智能技术、机器学习算法和自适应控制等方式来实现。